TR88.00.02 Implementation Pack ML
What is Pack ML/TR88.00.02?
TR88.00.02 is an implmentation guide/techchnical report for implmenting ANSI/ISA 88 for discrete machine control. For full factory control ISA 95 (Enterprise Control System Integration), ISA 88 (Batch Control) and TR88.00.02 work together to define data communication from the MES/ERP layer all the way down to machine control of individual machines on factory floor. While TR88.00.02/Pack ML was originally created to solve machine/line integration problem for the Packaging Industry, the integration problem is not unique to the Packaging Industry, many industries that integrate multiple machines together benefit from implementing ISA S88/TR88.00.02. It must be noted that the Pack ML system can be modified to accomodate the Weihnstephan Model. Which is generally a more "rigourous" interface for specific machinery types.
Who decides what goes into Pack ML/TR88.00.02
ANSI/ISA 88 is a standard governing Batch Control that was first published in 1995. S88 as it is commonly known has been widely adopted for process/batch control. S88 is great for processes that don't stop, or where time between batches may be days/weeks/months. S88 is not designed for "Discrete Machine Control". (machines that start and stop) ISA TR88.00.02 is governed by the ISA but maintained by the standards organization OMAC https://www.OMAC.org. Volunteers of OMAC member organizations/companies form committies every 5 years to update the TR88.00.02 report according to according ISA guidelines. These commities consist of Automation Suppliers, Machine Builders, and End Users. Regardless of the machine builder or automation supplier, machines implmenting Pack ML follow the same sequences with the same terminology and identical interface eliminating reprogramming to get machines to coordinate/communicate. Machines not following any standard must often have their code adjusted, and reprogrammed in order to get them to communicate to each other or a higher level controller.
Although Pack ML was originally created to solve a problem for the packaging industry, machine/line integration and lack of consistency is not unique to the Packaging Industry. Since its inception Pack ML/TR88.00.02 ML has been adopted in a wide variety of industries. It is also important to note that Pack ML state model can be modified to follow the Weihnstephan standard.
Pack ML has been around for a long time, but is regularly updated to address weaknesses and take advantage of technological advancement. Version 2.2 of Pack ML was released in 1996 and implmented 10 states. In 2005 it was updated to Version 3.0 which implented the current 17 states. In 2008 it was adopted by the ISA standards organization as TR88.00.02. Since that time working groups comprized of volunteers from OMAC member compaines/organization have worked together to update the standard twice since then. In 2015 a major update was made to allow for structured variables and eliminate a ton of variable names with _ restrictions. TR88.00.02-2015 in 2020-2022 Was once again updated to add even more data types and enhance operation of the state machine.
Getting Started with TR88.00.02/Pack ML
Before Implementing TR88.00.02 the OMAC Implementation guide should be consulted and the standard itself should be consulted. THe implmentation guide is available free of charge here on the OMAC website https://www.omac.org/packml it describes the intention and implmentation of Pack ML very well and is "Automation Supplier/Vendor" independent. The standard itself is available from the ISA https://www.isa.org/products/isa-tr88-00-02-2022-machine-and-unit-states-an-imp. If your organization wishes to have a say in the standard, not just implement, the OMAC organizaiton is open to any machine builder, automation supplier, or end user of any industry.
Important to note is that TR88.00.02 defines ONLY the top layer of the machine. It is common to take existing machines and implement a gateway/translation layer between the existing control and the standard TR88.00.02 interface. Brownfield implementation is a significant benefit to end users wishing to update/coordinate existing machines.
A common misconception is that Pack ML is big and has a lot of states and overhead that are not necessary and going to make the machine "slower". The standard allows for configuration, and a minimum set of States, and Tags.
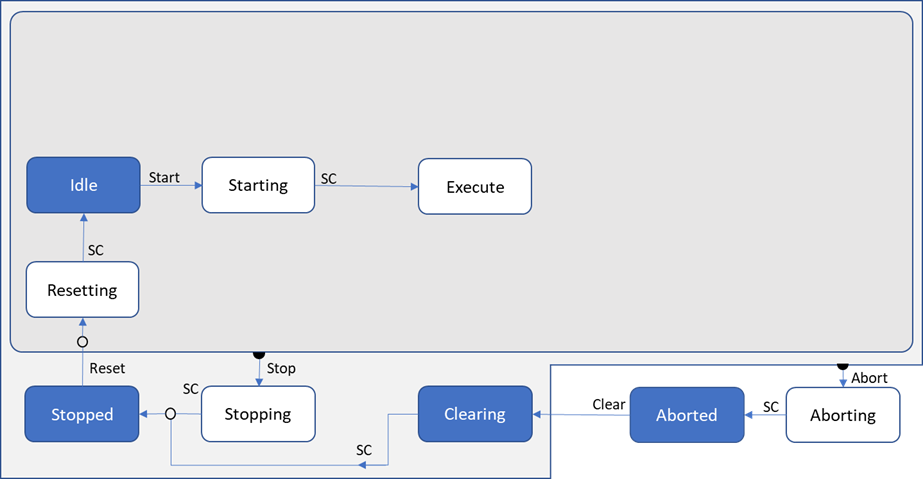
The full state model looks like this:
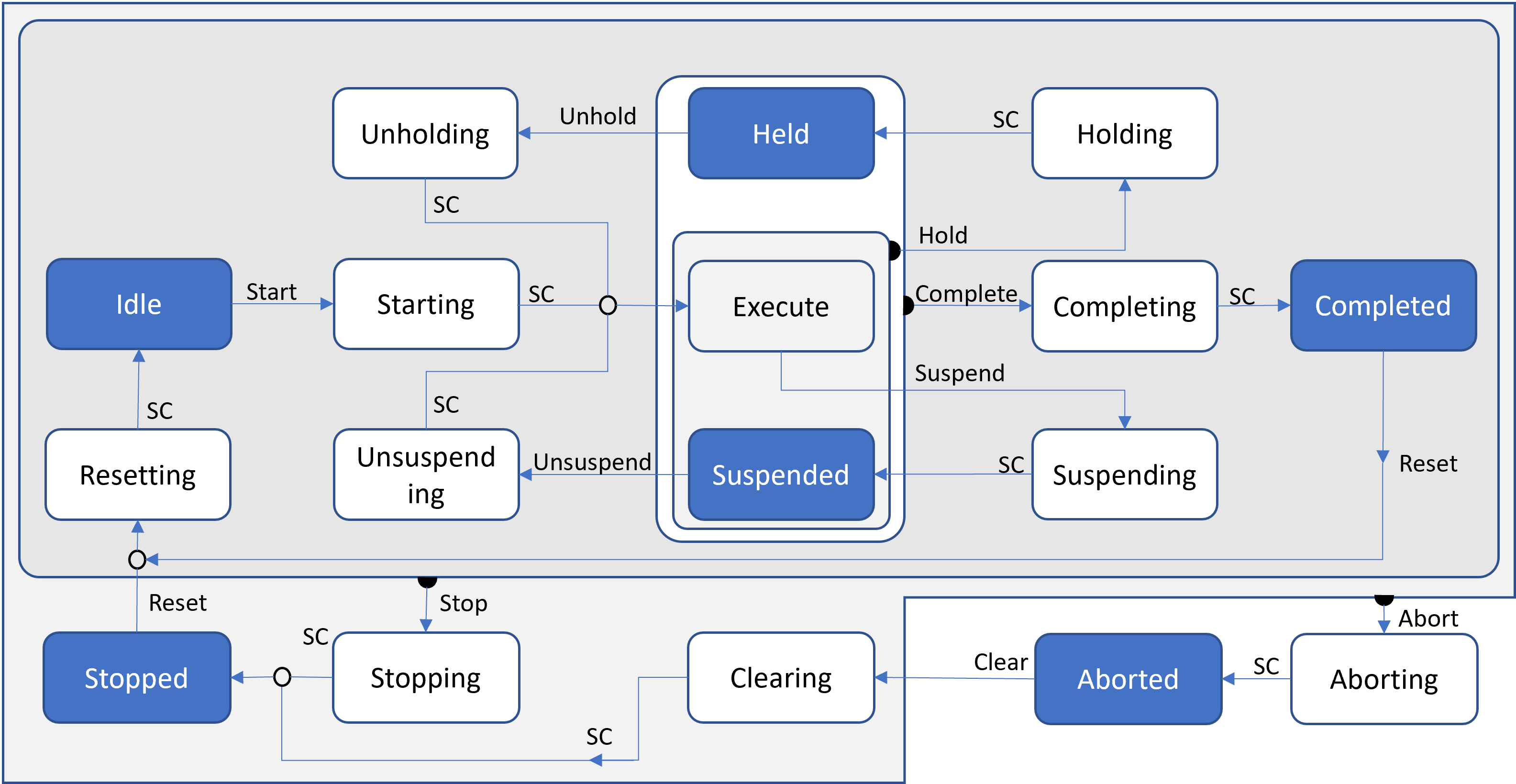
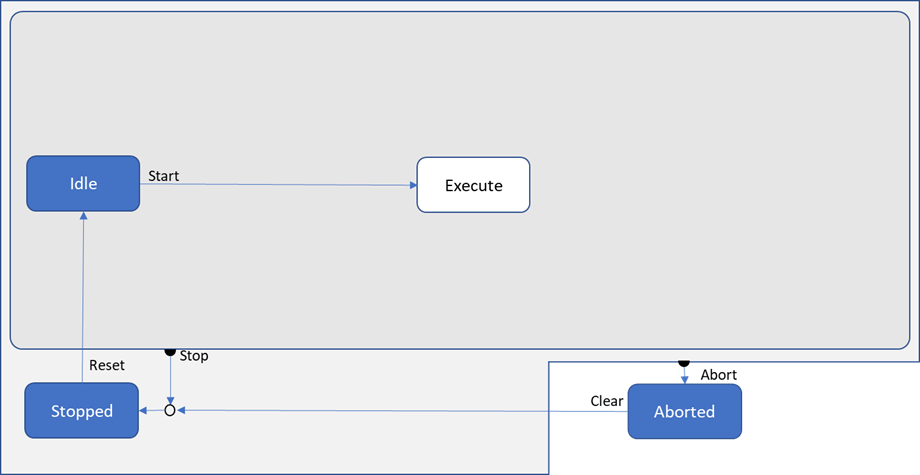
However the minimum State Module can be as simple as this
Depending what the machine is doing will determine what states it really needs, states that are not defined/implmented are skipped.
There are a lot of tags that can be implemented but there are very few that must be integrated. There are 5 mandatory control tags/variables to switch states/modes, 4 mandatory status variables/tags to confirm states/modes and 3 mandatory administration tags for stop reasons, and number produced and number defective. A grand 14 variables and 4 mandatory states a Pack ML implmentation can be extremely lightweight. Even implementing a gateway to translate
Possiblities
There are 31 modes of operation available, 3 have fixed names Producing, Maintenance and Manual. This leaves 28 other modes, that can be defined as necessary. For example Dry Run, Cleaning, Single Cycle or whatever else is necessary. Each mode can have have as many or as few states as required.
Many machine builders and technology providers have learned that the top level does not need to be the only part of the machine implmenting Pack ML. Just as multiple machines implementing Pack ML can be quickly connected together, so can modules within a machine. This is often refered to as Make2Pack but Make2Pack has never been ratified as a standard. Regardless of offical standardization, implementing Pack ML into Modules within the machine is very advantagous. If it has already been built once for the top level, why not simply re-use it for Modules within a machine. THe major advantage when implmenting TR88.00.02 at lower layers is the "standard" no longer applies. The state machine can be stripped down even further. Certain advantages remain, such as timing how long each module has been in which mode. This can be very handy if task timing is required.
State machine for a very basic device
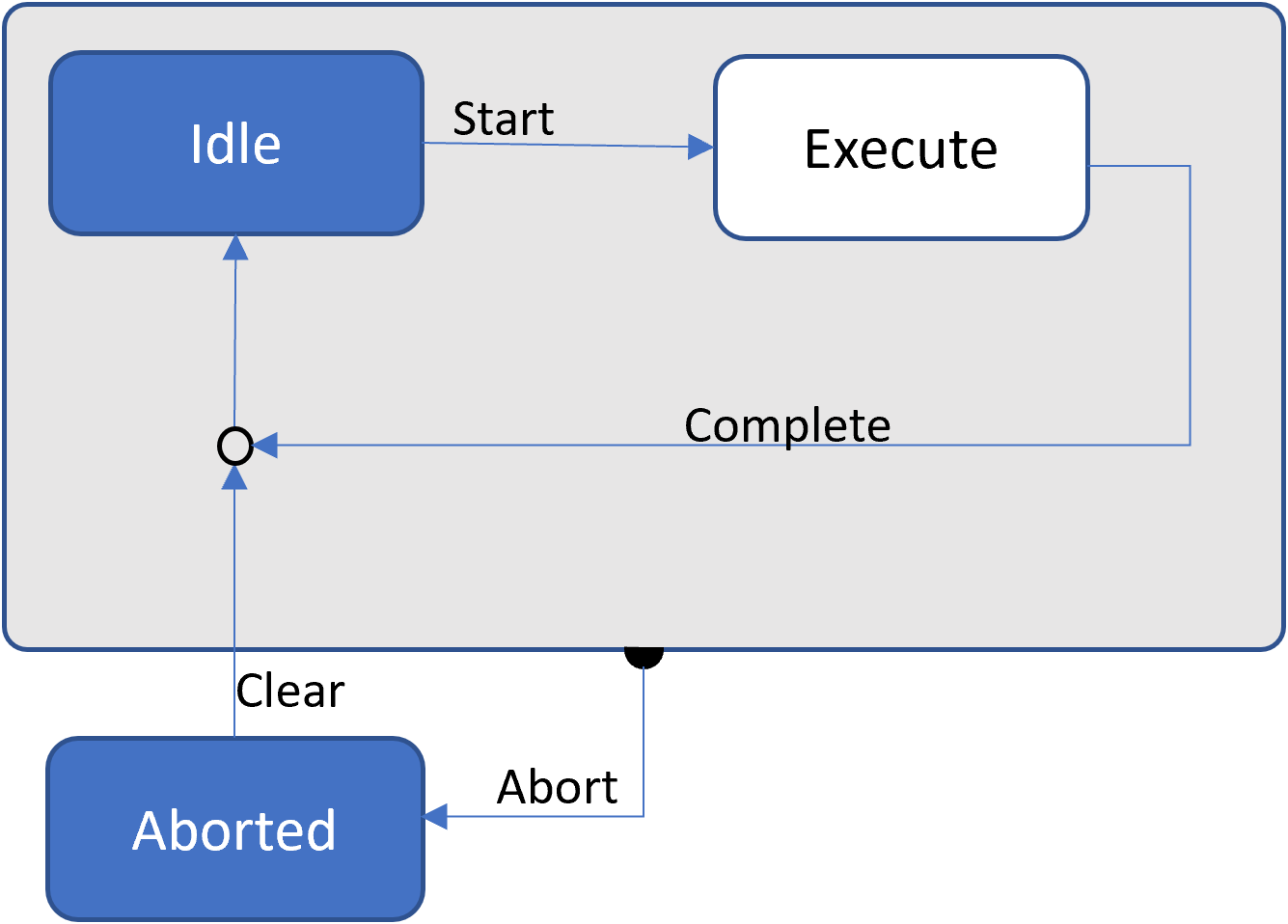
This sequence ensures the bare minimum number of commands/transitions so that no extra handshakes are necessary. Command clear to clear/reset and get to idle from aborted, Start changes to execute, when status confirms the device is in Execute the completed command can be issued to return to idle when finished. If complete did not exist, it would never be known if the system is in idle because the "start" has not yet been executed, or if the system has already been though execute and is back to idle. Why do this? Surely I can build something simpler, and that's true, but the state model also includes timing of each state, which means without adding anything we know how long the device was in Execute performing its function. The timing is automatically updated in the admin tags, and a bunch of diagnostics are now available "for free" and the commands to change states and trigger the sequence are already known.
Project Planning using States and Modes
It will be defined in depth further on in the documentation, however the specification of the machine and workload can be better estimated using TR88.00.02. By defining all devices/modules and all machine modes of operation, the funciton of each Module/Device in each mode and state can be defined and the amount of effort can be estimated. Definining all the modes first ensures all funcitons of all devices are clear. For example, knowing the machine will have a cleaning mode where certain devices will be controlled in a different way than every other mode, ensures those features are planned at the start, there is no surprise just as the machine is nearing completion. "Great everything works, now on this machine there's a cleaning mode and we have to open all these devices and run in a limited set of operations with some guarding open" this "small" feature suddenly has a drastic impact on coding effort and can even effect what has already been implmented. All devices need to be programmed to accomodate this completely new operation. This can have a significant effect particularly on areas like safety. Knowing the full scope of work at the beginning reduces the number of "surprises".
Deciding which states are needed
It is not required that all states be called from the machine module or submodule. For example, if a submodule has no work to perform in the Clearing state, then there is no need to call that method. When designing the architecture of the code it will be important to define which states are required for each submodule. Once the states have been decided and the functionality that will exist in each state defined then the methods can be added to override the methods of the base class.
Custom Modes
A common argument on why not to use TR88.00.02 is often stated, there’s too much there’s too many states and I don’t need all of them. There are too many states, too many tags and either I have a lot of other modes, or only one mode of operation. A feature of TR88.00.02 that is often overlooked is custom modes. There’s a minimum set of tags, and a minimum set of states. This is intended by the standard to make the system as lightweight as possible.
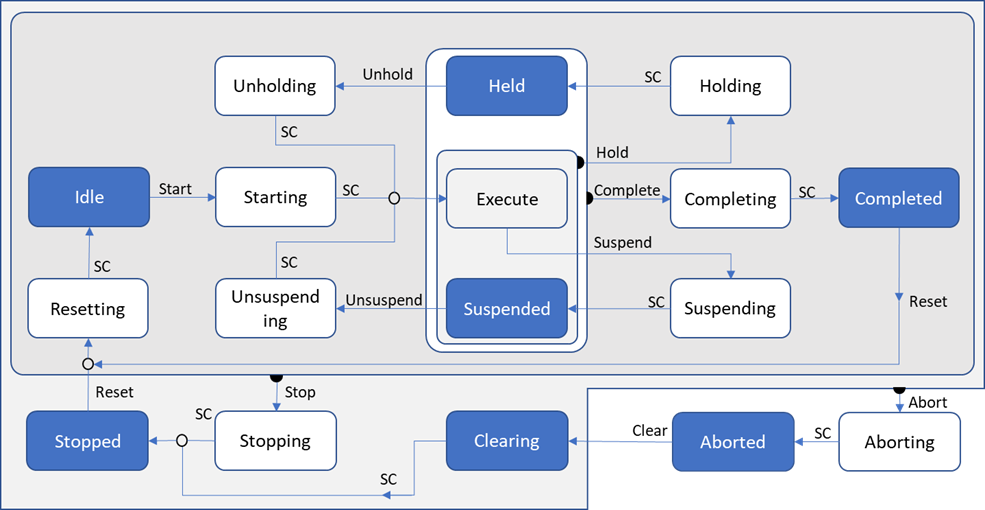
My layout starts like this and lets see what we can remove
To determine what modes are necessary we can start asking questions
Is “Complete” required?
Is there a situation where I have multiple items in process need to run out before stopping?
No this machine operates on one “item” at a time, its either empty or has one.
OK get rid of completing and complete they make no sense
Do I need suspend?
Does the machine have sensors to determine if it is starved from upstream or blocked downstream? No
Can the machine stay in Execute when empty? Yes
Suspend is not necessary, the machine can sit in execute or be stopped
Remove Suspending/Suspended/Unsuspending
Do I need Held? Is there anything the operator must do to keep the machine in execute? IE if the operator does not refill something the machine will run out and stop? No there is nothing to be re-filled/replaced/removed while in operation. No held is required, the machine can always sit in execute If there are things to be refilled/replaced, then Held would be required as the machine cannot stay in Execute if the operator has not performed a task.
We’re getting down to a pretty small state machine now, basically down to as many states as manual has.
There’s still some work to be done
Is Aborting required? Are there any things I need to “ramp down” or can I simply shut everything off? If so, aborting isn’t needed go to abort shut everything off
Is Stopping required? If I don’t need aborting I most likely don’t needs stopping, again is there a specific sequence that takes some time to complete? If not, stopping can be removed
Is Resetting required? Do certain devices have to start up in a certain sequence? Can I simply “enable them” in Idle and leave them enabled? If I can
Clearing? Is there a sequence that has to happen in clearing or can I sit in Stopped and perform the clear?
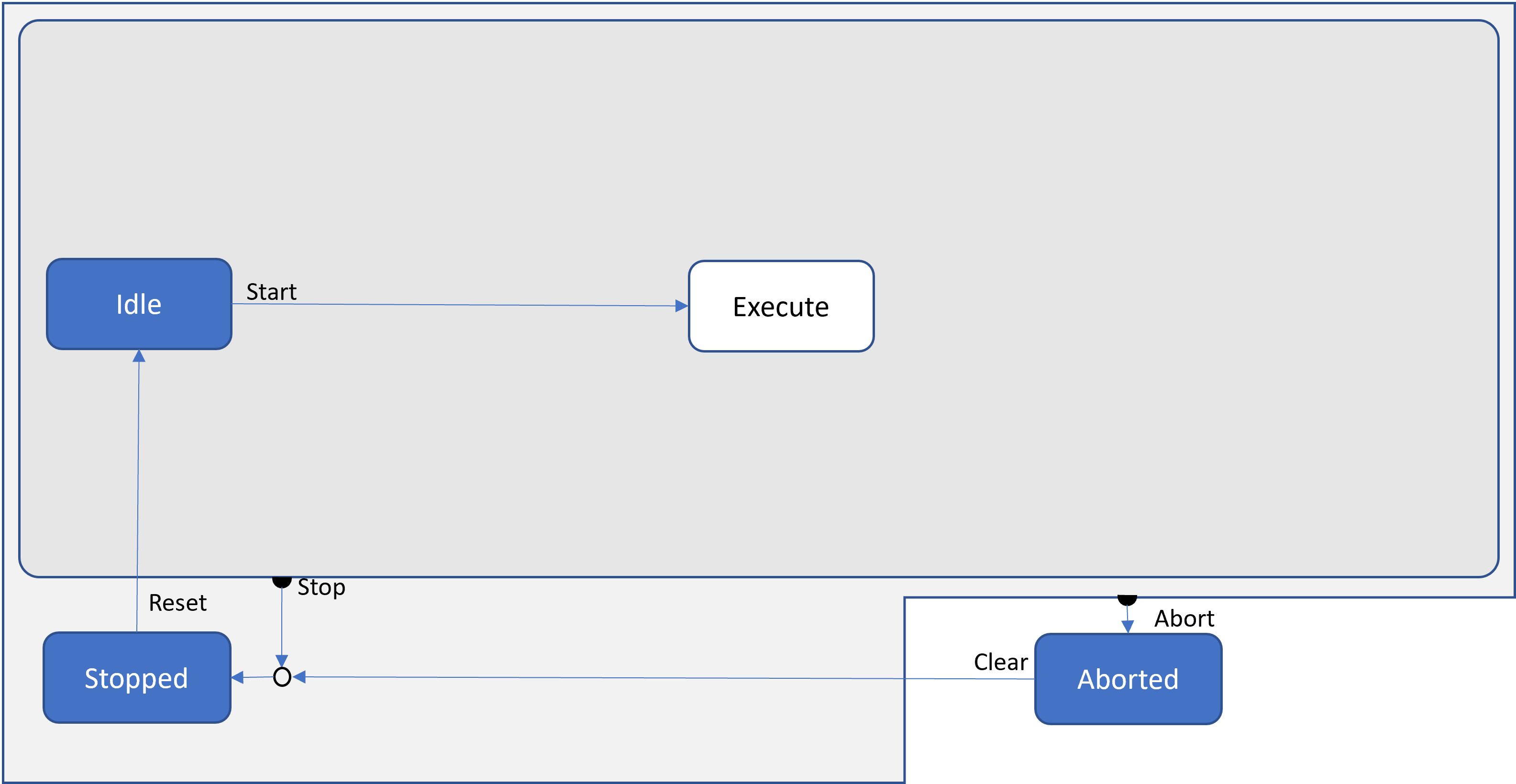
If this is all that’s necessary we’re down to the minimum set of states
States and 4 commands between states is the smallest allowed machine configuration this would be ideal for an inspection system
If the machine is a vison inspection system nothing more is needed. Turn the machine on and it’s in aborted. Clear any faults on the screen and its in stopped.
Reset to go to idle and enable the motor for the belt
Start to get to execute and run the belt. Nothing more is required.
The machine sits in Execute waiting for parts/pieces to arrive, when they arrive, they are processed. No parts, no problem sits in execute. More states are not necessary, but fewer states is problematic. It is important to differentiate between a requested stop and an error/unrequested stop. It is also desirable to have an Idle state with components enabled but no motion. Abort and Stop mean different things to the line controller. On an Abort, the line controller may need to abort machines up/downstream but on a stop it may simply put them into stop or suspend.
Even though there are only 4 states a second mode other that producing may be required. For example, there’s a calibration mode, where a series of self tests are completed. Accidentally receiving parts in this calibration mode could be very problematic and almost certainly result in a false calibration. Sure in Execute an “if calibrate, stop motor” is possible, but the whole idea of states and modes is to ensure there is no accidental way to perform a function from one mode that must not happen in another mode. Switching to a calibration mode, helps to ensure different code is called and sequences for the calibration function cannot occur during production and production cannot occur during calibration.
A labelling machine likely needs at least one more state, Held. Labels/Ink are not infinite and often require refilling from an operator. As indicated earlier, stop and particularly abort mean different things to the line controller. A labeller that is without label cannot be in execute but it also does not require to enter stopped state, a held state should be used here. The machine is “held” when it is out of labels, but when refilled can immediately restart operation without running through resetting. A suspend may still not be required as if no products show up no labels are place.
If machine should offer a low power state that if no products are arriving or an output buffer is full, then a suspend state is beneficial the machine can enter/exit suspending without operator intervention.
Add as many states/modes as necessary to fulfil all machine functions but states can be eliminated when they are not necessary. 1.1.1 Internal modes For sub devices, such as equipment modules and components it may be desirable to make even smaller state modes. The minimum state set is for machine modes at the top layer. Below that, TR88.00.02 has no influence. It makes sense to use modes and states with equipment modules but an even smaller subset of states can be used.
For example Aborted Idle Execute Completed might be enough. If faulted, Clear to get to idle, to perform a function Start and execute, when the function is finished go to completed, to trigger another sequence reset to get back to idle.
Why can’t I simply have Idle, Execute and aborted? Prior to the 2022 version of the standard this was problematic. Execute automatically completes and issues a state change, if completed doesn’t exist, it goes right back to ide. Sounds like it does exactly what I want, however: When you command start, you are in idle, and when you check again you are in idle. Now the question is, is the device in Idle because it performed the function or is it in idle because execute has not started yet? In TR88.00.02-2022 this was addressed getting out of Execute can now be accomplished with the command complete. This now gives the full handshake necessary. Command Start, Wait for execute, Command Complete, wait for Idle, and then command start again. Aborted, Execute Idle will function without any other handshakes required, switching the command from Start to Complete and the state changes from Idle to Execute completes the handshake. State Idle with Command complete means the last cycle finished.