DUTs
ENUMs
E_KinematicDOF
1
2
3
4
5
6
7
8
9
10
11
12 | {attribute 'qualified_only'}
{attribute 'strict'}
TYPE E_KinematicDOF :
(
eKinematicDOF_2 := 2, //
eKinematicDOF_3 := 3, //
eKinematicDOF_4 := 4, //
eKinematicDOF_5 := 5, //
eKinematicDOF_6 := 6, //
eKinematicDOF_Max := 7 //
);
END_TYPE
|
E_AcsJoint
| {attribute 'qualified_only'}
TYPE E_AcsJoint :
(
Joint_1 := 1,
Joint_2 := 2,
Joint_3 := 3,
Joint_4 := 4,
Joint_5 := 5,
Joint_6 := 6
);
END_TYPE
|
E_McsAxis
| {attribute 'qualified_only'}
TYPE E_McsAxis :
(
X := 1,
Y := 2,
Z := 3,
Rot1 := 4, // C1, Rx,..
Rot2 := 5, // C2, Ry,..
Rot3 := 6 // C3, Rz,..
);
END_TYPE
|
STRUCTs
ST_KinematicPosition
| TYPE ST_KinematicPosition :
STRUCT
ACS : ARRAY[1..8] OF LREAL;
MCS : ARRAY[1..8] OF LREAL;
END_STRUCT
END_TYPE
|
ST_KinematicMotionParameter
| TYPE ST_KinematicMotionParameter :
STRUCT
Acs : ARRAY[1..KINEMATIC_CONSTANTS.DEGREES_OF_FREEDOM] OF ST_KinematicMotionParameterValues;
Mcs : ARRAY[1..KINEMATIC_CONSTANTS.DEGREES_OF_FREEDOM] OF ST_KinematicMotionParameterValues;
END_STRUCT
END_TYPE
|
ST_KinematicMotionParameterValues
| TYPE ST_KinematicMotionParameterValues :
STRUCT
Position : LREAL;
Acceleration : LREAL;
Deceleration : LREAL;
Jerk : LREAL;
END_STRUCT
END_TYPE
|
ST_BasePoint
| TYPE ST_BasePoint :
STRUCT
AcsPosition : ARRAY[1..KINEMATIC_CONSTANTS.DEGREES_OF_FREEDOM_MAX] OF LREAL;
END_STRUCT
END_TYPE
|
ST_KinematicComponentAmp_CmGroupState
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23 | TYPE ST_KinematicComponentAmp_CmGroupState :
STRUCT
McToPlcCm : CDT_MCTOPLC_GROUP_CM;
GroupBuilt : BOOL;
GroupMoving : BOOL;
GroupHoming : BOOL;
GroupErrorStop : BOOL;
GroupNotReady : BOOL;
GroupStandby : BOOL;
GroupStopping : BOOL;
GroupDisabled : BOOL;
GroupTrackingInSync : BOOL;
GroupTrackingActive : BOOL;
GroupTrackingCommandAborted : BOOL;
AllAxesStanding : BOOL;
ConstantVelocity : BOOL;
Accelerating : BOOL;
Decelerating : BOOL;
InPosition : BOOL;
Error : BOOL;
ErrorId : UDINT;
END_STRUCT
END_TYPE
|
ST_AmpPoint
Advanced Motion Pack Space Point incl. required parameter for move. This struct can be used to create Machine Point Management System (e.g. Teaching).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
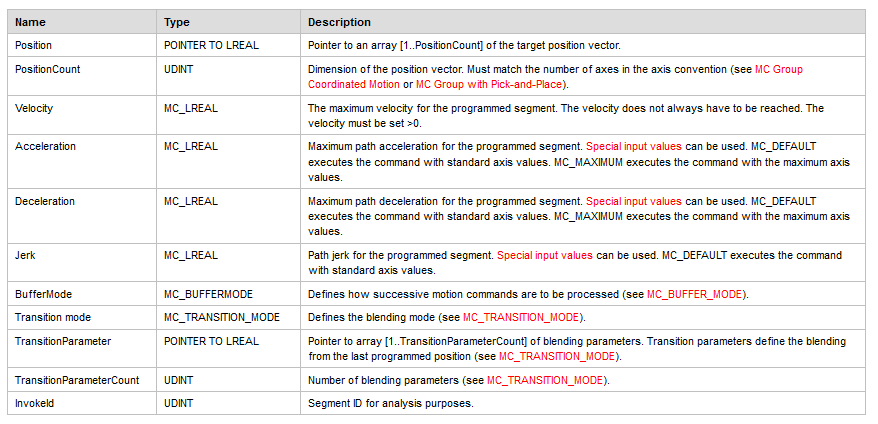
22 | TYPE ST_AmpPoint EXTENDS ST_BasePoint :
STRUCT
CircularMove : ST_AmpPointCircular;
Velocity : MC_LREAL := MC_INVALID;
Acceleration : MC_LREAL := MC_DEFAULT;
Deceleration : MC_LREAL := MC_DEFAULT;
Jerk : MC_LREAL := MC_DEFAULT;
BufferMode : MC_BUFFERMODE := MC_BUFFER_MODE.mcAborting;
TransitionMode : MC_TRANSITION_MODE := mcTransModeNone;
TransitionParameter : ARRAY[1..2] OF LREAL;
TransitionParameterCount: UDINT;
InvokeId : UDINT;
END_STRUCT
END_TYPE
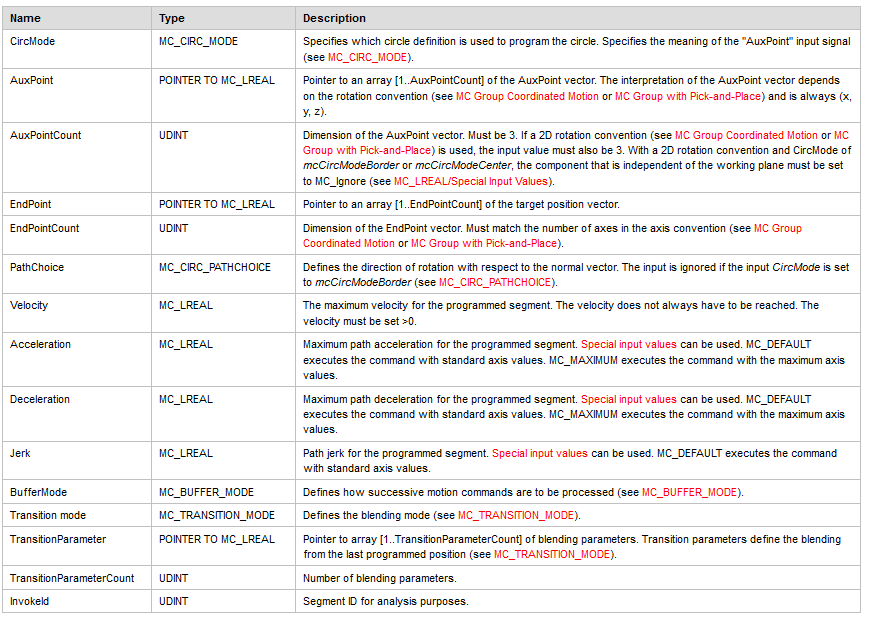
TYPE ST_AmpPointCircular :
STRUCT
CircMode : MC_CIRC_MODE;
AuxPoint : ARRAY[1..3] OF MC_LREAL;
PathChoice : MC_CIRC_PATHCHOICE;
END_STRUCT
END_TYPE
|
Warning
BufferMode and TransitionMode are dependent on each other. 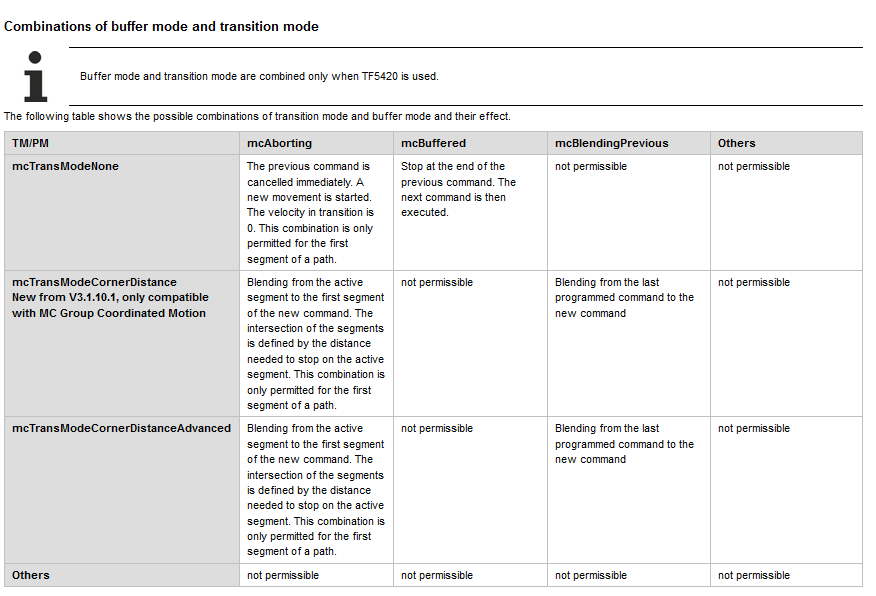
ST_CamTableSlaveDynamics
| TYPE ST_CamTableSlaveDynamics :
STRUCT
SlavePosition : LREAL;
SlaveVelocity : LREAL;
SlaveAcceleration : LREAL;
END_STRUCT
END_TYPE
|